Векторы
Векторы - это математические объекты, которые широко используются в различных областях науки, инженерии и математике. Они используются для представления физических величин, таких как сила, скорость, ускорение и перемещение, которые имеют как величину, так и направление.
Вектор обычно представлен стрелкой с длиной и направлением. Длина стрелки представляет собой величину вектора, а направление стрелки - направление вектора. Величина вектора является скалярным значением и обозначается .
Векторы могут быть обозначены путем именования их начальной и конечной точек, где начальная точка - хвост вектора, а конечная точка - голова вектора. Например, вектор от точки до точки может быть обозначен как .
Векторы имеют ряд свойств, которые важны в математике и физике. Некоторые из основных свойств векторов включают:
Величина: Векторы имеют величину или длину, которая является неотрицательным скаляром, который представляет собой размер вектора.
Направление: Векторы имеют направление, которое можно указать с помощью углов или других направленных обозначений. Направление вектора определяется углом между вектором и фиксированным направлением.
Сложение: Векторы могут быть сложены вместе с использованием параллелограмма или треугольника закона сложения векторов. Это включает в себя сложение соответствующих компонент каждого вектора для получения результирующего вектора.
Скалярное умножение: Векторы могут быть умножены на скаляры, что изменяет величину и/или направление вектора. Скалярное умножение включает умножение каждой компоненты вектора на скаляр.
Скалярное произведение: Векторы могут быть перемножены с использованием скалярного произведения или скалярного произведения. Скалярное произведение двух векторов является скаляром, который представляет собой произведение их величин и косинуса угла между ними.
Векторное произведение: Векторы также могут быть умножены с использованием векторного произведения или векторного произведения. Векторное произведение двух векторов - это вектор, перпендикулярный обоим исходным векторам и имеющий величину, равную произведению их величин на синус угла между ними.
Нулевой вектор:
Существует уникальный вектор, называемый нулевым вектором, обозначаемый , который имеет величину и нет направления. Его можно рассматривать как вектор, идущий из одной точки в себя, или, что эквивалентно, как разность любых двух равных векторов.
Например, .
Единичный вектор: Единичный вектор - это вектор с величиной 1. Любой ненулевой вектор может быть разделен на его величину, чтобы получить единичный вектор в том же направлении.
Коллинеарные векторы: Векторы коллинеарны, если они лежат на одной линии или параллельны. Другими словами, они имеют одинаковое или противоположное направление. Коллинеарные векторы могут быть записаны в виде скалярных кратных друг друга. Если два вектора и коллинеарны, то существует скаляр такой, что или \( \vec{w} = k \vec{v} \). Это означает, что один вектор является скалярным кратным другого, и они указывают в одном или противоположном направлении.
Ортогональные векторы: Два вектора ортогональны, если их скалярное произведение равно нулю. Ортогональные векторы также называются перпендикулярными векторами, и между ними образуется угол 90 градусов.
Базисные векторы: Набор базисных векторов - это набор линейно независимых векторов, которые могут быть использованы для представления любого другого вектора в пространстве. Самые распространенные базисные векторы - это стандартные единичные векторы в трехмерном пространстве, обозначаемые , и .
Линейная независимость: Набор векторов линейно независим, если ни один из векторов в наборе не может быть выражен как линейная комбинация других. Если набор векторов линейно независим, то он может быть использован в качестве базиса для векторного пространства.
Объем: Объем набора векторов - это набор всех линейных комбинаций этих векторов. Объем набора векторов является подпространством векторного пространства, содержащего эти векторы.
Проекция: Проекция одного вектора на другой является компонентом первого вектора, лежащим в направлении второго вектора. Проекция вектора на вектор задается формулой
Компонента: Компонента одного вектора вдоль другого - это часть первого вектора, лежащая в направлении второго вектора. Компонента вектора вдоль вектора задается формулой где - угол между и .
Параллельный транспорт: Параллельный транспорт - это способ перемещения векторов вдоль кривой таким образом, чтобы сохранялось их направление. Параллельный транспорт используется в дифференциальной геометрии и других областях для изучения кривизны кривых и поверхностей.
Ковариация и контравариация:
В математике и физике векторы часто классифицируются как ковариантные или контравариантные в зависимости от того, как их компоненты преобразуются при преобразованиях координат. Ковариантные векторы имеют компоненты, которые преобразуются так же, как координаты, в то время как контравариантные векторы имеют компоненты, которые преобразуются противоположным образом.
Концепция ковариации и контравариации широко используется в тензорном исчислении и других областях математики и физики.
Это лишь несколько из множества свойств векторов.
Длина вектора (Величина, Модуль вектора)
В математике длина вектора также известна как его величина или модуль вектора. Она представляет собой расстояние между началом и концом вектора в геометрическом пространстве.
Для вектора с компонентами в трехмерном пространстве его длина может быть вычислена с использованием следующей формулы:
.
В двумерном пространстве формула для длины вектора с компонентами выглядит так: .
В общем случае длина вектора может быть вычислена с использованием теоремы Пифагора, которая утверждает, что квадрат длины вектора равен сумме квадратов его компонент.
Направление вектора
Направление вектора можно определить, вычислив его угол относительно опорной оси. Этот угол часто измеряется против часовой стрелки от положительного направления опорной оси.
Если - вектор в двумерном пространстве с компонентами , то его направление определяется по формуле: , где arctan - обратная тангенсная функция.
В трехмерном пространстве вектор с компонентами может быть представлен в виде направленного отрезка от начала координат до точки . Его направление может быть описано двумя углами: азимутальным углом , который измеряется против часовой стрелки от положительной -оси в плоскости
, и полярным углом , который измеряется от положительной -оси до отрезка.
Азимутальный угол задается формулой: .
если , и .
если , полярный угол определяется формулой: , где - длина вектора .
Другой способ описать направление вектора в трехмерном пространстве - использовать его косинусы направления. Косинусы направления вектора с компонентами определяются как: , , , где , и \(
\gamma \) - углы между вектором и положительными осями , и , соответственно.
Если известны косинусы направления вектора, его направление можно определить с помощью следующих уравнений: , где - азимутальный угол, а - полярный угол.
Кроме того, направление вектора также можно описать с использованием единичных векторов. Единичный вектор - это вектор с длиной 1, который указывает в том же направлении, что и исходный вектор. Для заданного вектора его единичный вектор может быть вычислен как: .
После того как известен единичный вектор, его направление можно описать углами и , как описано выше.
Следует отметить, что направление вектора не зависит от его длины. Следовательно, вектор и скалярное произведение этого вектора имеют одинаковое направление.
Сложение и вычитание коллинеарных векторов
Коллинеарные векторы - это векторы, лежащие на одной линии. Когда два коллинеарных вектора складываются или вычитаются, результатом является также коллинеарный вектор. Величина результата равна сумме или разности величин двух векторов, в зависимости от того, складываем мы их или вычитаем. Направление результата такое же, как у направления двух векторов, так как они коллинеарны.
Предположим, у нас есть два коллинеарных вектора и , с величинами и соответственно. Если они указывают в одном направлении, их сумма равна: . Где - единичный вектор в направлении . Если они указывают в противоположных направлениях, их разность равна:
Методы сложения и вычитания неколлинеарных векторов
Неколлинеарные векторы - это векторы, которые не лежат на одной линии. При сложении или вычитании неколлинеарных векторов мы используем закон параллелограмма или закон треугольника, в зависимости от ситуации.
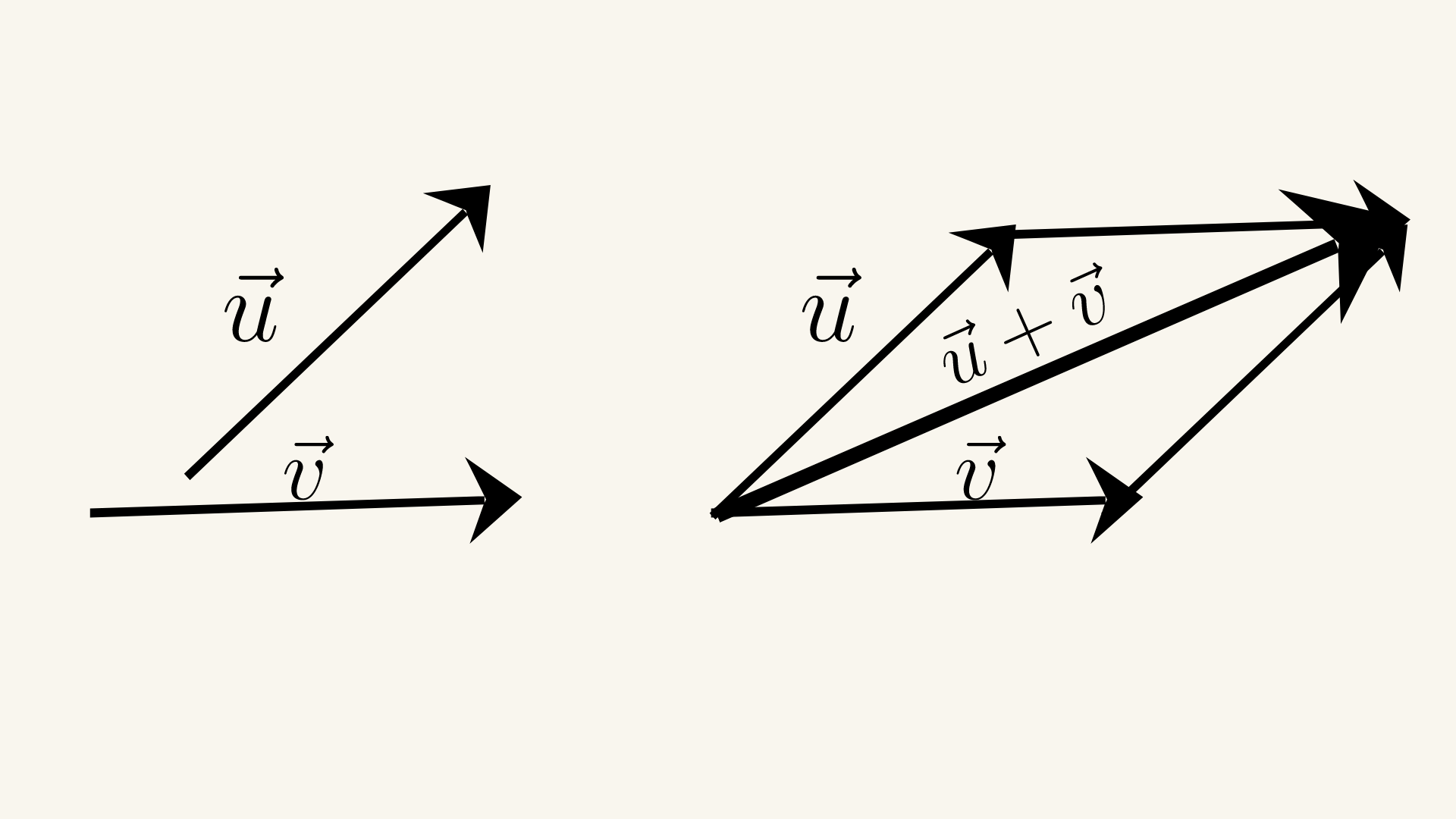
Закон параллелограмма
Закон параллелограмма утверждает, что сумма двух векторов может быть найдена, поместив векторы голова к хвосту и нарисовав параллелограмм, образованный этими двумя векторами. Суммарный вектор - это диагональ параллелограмма, начинаясь с общей точки двух векторов. Закон параллелограмма может использоваться для сложения любого числа векторов, а не только двух.
Предположим, у нас есть два неколлинеарных вектора и . Мы можем найти их сумму с использованием закона параллелограмма: .
Сначала мы помещаем хвост вектора к голове вектора , чтобы образовать параллелограмм. Диагональ параллелограмма, начинающаяся с общей точки двух векторов, представляет собой суммарный вектор . Величина суммарного вектора может быть найдена с использованием теоремы косинусов: \( |\vec{c}|^2 = |\vec{a}|^2 +
|\vec{b}|^2 + 2 |\vec{a}| |\vec{b}| \cos \theta \), где - угол между векторами и .
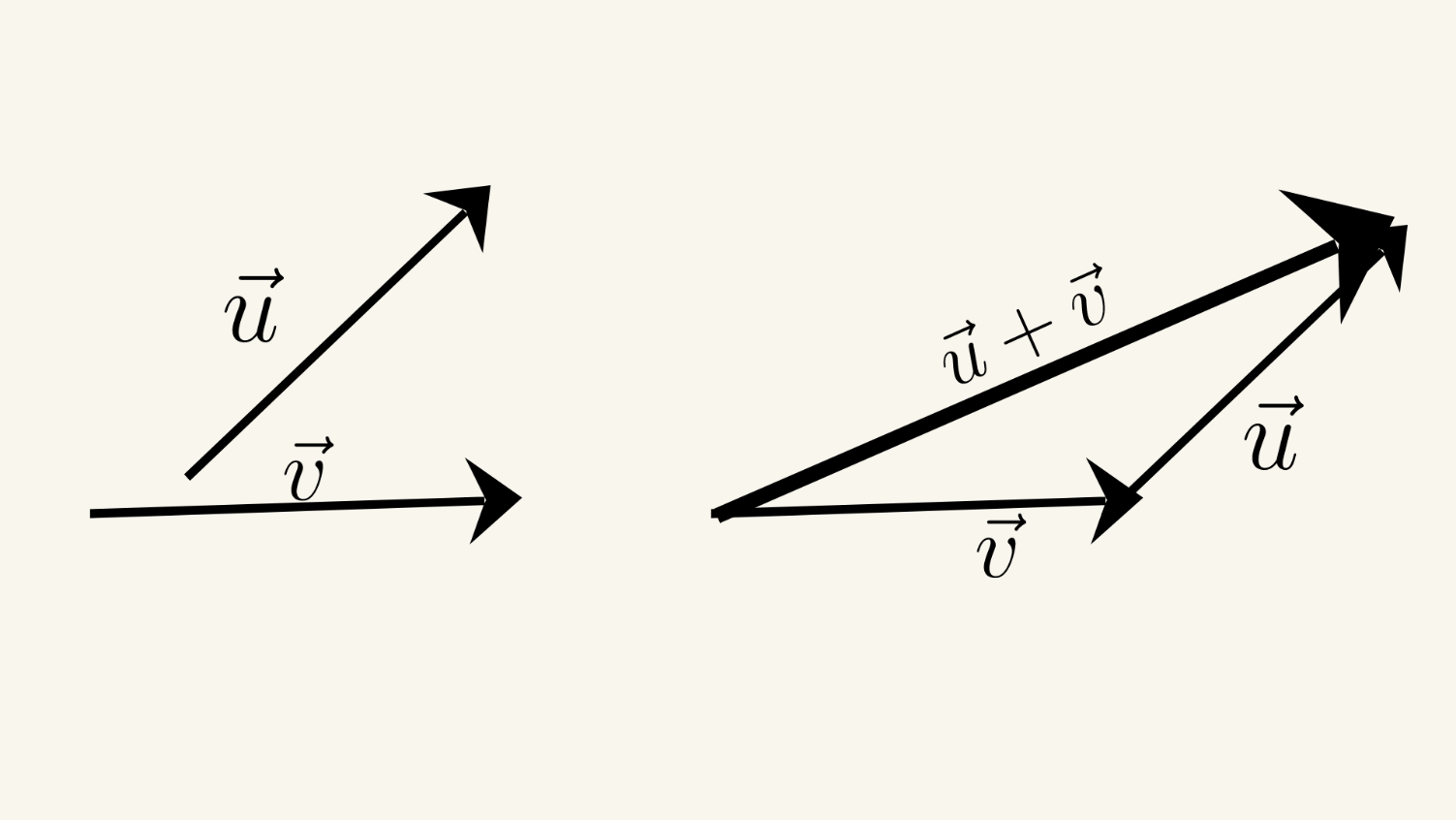
Закон треугольника
Закон треугольника утверждает, что сумма двух векторов может быть найдена, поместив векторы голова к хвосту и нарисовав третью сторону треугольника, соединяющую хвост первого вектора с головой второго вектора. Суммарный вектор - это диагональ треугольника, начинаясь с общей точки двух векторов.
Предположим, у нас есть два неколлинеарных вектора и . Мы можем найти их сумму с использованием закона треугольника: .
Сначала мы помещаем хвост вектора в начало координат, а затем помещаем хвост вектора к голове вектора . Суммарный вектор - это диагональ треугольника, начинающаяся в начале координат и соединяющая голову вектора . Величина суммарного вектора может быть найдена с использованием теоремы
косинусов: , где - угол между векторами и .
Вычитание векторов также можно выполнить с использованием как закона параллелограмма, так и закона треугольника. Чтобы вычесть вектор из вектора , мы просто изменяем направление вектора и добавляем его к вектору с использованием как закона параллелограмма, так и закона треугольника. \( \vec{a} - \vec{b} =
\vec{a} + (-\vec{b}) \)
Свойства сложения векторов
Сложение векторов имеет несколько важных свойств, которые делают его полезным в физике и других областях:
-
Коммутативное свойство:
Порядок, в котором складываются векторы, не влияет на результат.
. -
Ассоциативное свойство:
При сложении более чем двух векторов порядок, в котором мы группируем векторы, не влияет на результат.
. -
Нулевой вектор:
Нулевой вектор , с нулевой величиной и любым направлением, является аддитивной единицей для векторов. Добавление нулевого вектора к любому вектору не изменяет вектор.
. -
Аддитивная инверсия:
Для каждого вектора существует аддитивная инверсия , такая что их сумма является нулевым вектором.
. -
Распределительное свойство:
Скалярное умножение распространяется на сложение векторов.
, где - любой скаляр.
Сложение векторов с использованием компонентов
При сложении векторов с использованием компонентов первым шагом является разложение каждого вектора на его компоненты и . Это можно сделать с использованием тригонометрических функций, таких как синус и косинус. Например, учитывая вектор с величиной "" и углом "" относительно оси , его и компоненты могут быть найдены
следующим образом:
-компонента: .
-компонента: .
Как только оба вектора были разложены на их и компоненты, компоненты можно сложить отдельно. Например, если у нас есть два вектора и , их -компоненты могут быть сложены вместе, чтобы получить -компоненту результирующего вектора , а их -компоненты могут быть сложены вместе, чтобы получить -компоненту :
Наконец, величина и угол вектора могут быть найдены с использованием теоремы Пифагора и обратных тригонометрических функций, соответственно:
величина : .
угол : .
Обратите внимание, что угол может потребоваться скорректировать в зависимости от квадранта, в котором он находится, так как обратные тригонометрические функции дает углы в диапазоне от до .
Для коррекции угла вектора необходимо учитывать знаки его и компонент. Если и оба положительны, то угол просто является обратным тангенсом от . Если отрицателен и положителен, то угол равен 180 градусам минус обратный тангенс от . Если и отрицательны, то угол равен 180 градусам плюс обратный тангенс от . Наконец, если положителен и отрицателен, то угол равен 360 градусам минус обратный тангенс от .
Например, предположим, у нас есть два вектора и с величинами 3 и 4 соответственно, и углами 30 градусов и 60 градусов относительно оси . Мы можем найти и компоненты каждого вектора следующим образом:
Затем мы можем сложить и компоненты и , чтобы получить и компоненты :
Величина вектора равна:
Угол равен:
Поскольку и , и положительны, это окончательный ответ. Следовательно, результирующий вектор имеет величину 6.425 и угол 49.1 градусов относительно оси .
Скалярное умножение
Скалярное умножение - это операция умножения вектора на скаляр, который является вещественным числом. Когда вектор умножается на скаляр, величина вектора масштабируется абсолютным значением скаляра, а направление вектора остается неизменным, если скаляр положителен, или изменяется на противоположное, если скаляр отрицателен.
Математически скалярное умножение может быть выражено следующим образом: учитывая вектор и скаляр , скалярное произведение , обозначенное , является вектором с тем же направлением, что и , но с величиной, умноженной на абсолютное значение :
Если положителен, то направление такое же, как направление . Если отрицателен, то направление противоположно направлению .
Скалярное умножение может использоваться для растяжения или сжатия векторов. Например, если у нас есть вектор , представляющий перемещение в метрах, мы можем умножить его на скаляр, чтобы представить перемещение, которое больше или меньше, чем . Кроме того, скалярное умножение может использоваться для изменения направления вектора путем
умножения его на .
Скалярное умножение также может использоваться для нахождения линейных комбинаций векторов. Линейная комбинация двух векторов представляет собой просто сумму векторов, умноженных на скалярные коэффициенты.
Например, учитывая два вектора и , линейная комбинация может быть вычислена следующим образом: Полученный вектор является линейной
комбинацией и с коэффициентами и соответственно.
Скалярное умножение также удовлетворяет нескольким важным свойствам:
- Дистрибутивность: Для любых скаляров и и любого вектора , мы имеем .
- Ассоциативность: Для любого скаляра и любых векторов и , мы имеем .
- Совместимость с умножением: Для любых скаляров и и любого вектора , мы имеем .
Эти свойства делают скалярное умножение полезным инструментом для манипулирования и решения систем линейных уравнений.
Параллельный транспорт
Параллельный транспорт - это концепция в дифференциальной геометрии, которая описывает, как вектор или касательное пространство вдоль кривой могут быть транспортированы вдоль кривой без изменения своего направления. Это важное понятие для понимания геометрии изогнутых пространств.
В общем случае кривая на многообразии - это путь, который соединяет две точки на многообразии. Касательный вектор - это вектор, касательный к кривой в определенной точке. Параллельный транспорт вдоль кривой - это процесс перемещения касательного вектора вдоль кривой с сохранением его касательности к кривой в каждой точке.
Идея параллельного транспорта тесно связана с концепцией связи на многообразии. Связь - это способ связывания касательных пространств в различных точках на многообразии. Она позволяет сравнивать касательные векторы в различных точках кривой.
Чтобы определить параллельный транспорт, необходимо указать связь на многообразии. Учитывая связь, параллельный транспорт вектора вдоль кривой определяется как уникальный вектор, касательный к кривой в каждой точке и компоненты которого в определенном базисе остаются постоянными вдоль кривой.
Понятие параллельного транспорта важно во многих областях физики, включая общую теорию относительности, где оно используется для описания транспортировки тензоров вдоль изогнутых траекторий пространства-времени.
Преобразование и конгруэнтные фигуры
Преобразование относится к процессу изменения положения, размера или формы геометрической фигуры. Существует несколько типов преобразований, включая трансляции, отражения, повороты и дилатации. Конгруэнтные фигуры - это геометрические фигуры, у которых одинаковый размер и форма, и их соответствующие стороны и углы конгруэнтны.
Вот несколько важных теорем, связанных с преобразованиями и конгруэнтными фигурами:
- Соответствующие части конгруэнтных фигур конгруэнтны (CPCTC): Эта теорема утверждает, что если две фигуры конгруэнтны, то их соответствующие стороны, углы и вершины конгруэнтны.
- Сложение трансляций является трансляцией: Если две трансляции выполняются одна за другой, то полученное преобразование также является трансляцией.
- Сложение отражений является поворотом или трансляцией: Если два отражения выполняются одно за другим, то полученное преобразование является либо поворотом, либо трансляцией.
- Сложение поворотов является поворотом: Если два поворота выполняются один за другим, то полученное преобразование также является поворотом.
- Сложение дилатации и трансляции является дилатацией: Если дилатация и трансляция выполняются одна за другой, то полученное преобразование также является дилатацией.
- Сложение дилатации и поворота является дилатацией или поворотом: Если дилатация и поворот выполняются одна за другой, то полученное преобразование является либо дилатацией, либо поворотом.
- Сложение двух конгруэнтных преобразований является конгруэнтным преобразованием: Если два преобразования конгруэнтны, то их композиция также конгруэнтна.
Эти теоремы важны для понимания свойств преобразований и конгруэнтных фигур, и их можно использовать для доказательства различных геометрических теорем и решения задач в геометрии.